Scribes: Cameron Ketcham and Nick Graham
Scheduling
Scheduling Metrics
- how can we prove: "the Linux scheduler sucks?"
Scheduling metrics have been studied long before the first scheduler was made for a CPU. Big companies such as Ford wanted an optimal way put their cars together, making sure they had all the parts at the right times.
Metrics
Task Timeline for factories
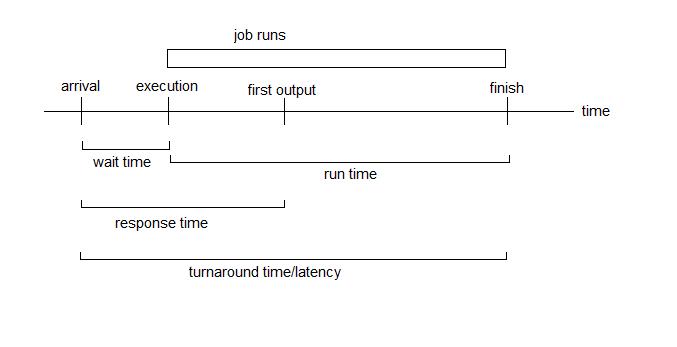
credit Spring 08 CS111 scribe notes
- arrival - the first time you know you need to complete a task
- execution begins - first instruction executed
- first output - the first time you know you need to complete a task
- execution ends - last instruction finshed
- wait time - the time between the first arrival and when execution begins
- response time - the time between arrival and the first output (useful for interactive applications)
- turnaround time (latency) - the time between arrival and when the execution ends
the definition of task is critical
- browser opening and closing
- getting a single webpage
when measuring these quantities we use statistics
- average (mean) - the wait time or latency etc.
- variance - how bursty, unreliable, flaky
As programmers we want to try keep the variance small so the users wait about the same amount of time for the same types of tasks.
Side note: Scheduling can apply to CPU (time), disk, memory (RAM), network, battery, etc. We will be dealing with CPU (time)
Statistics for multiple tasks
- throughput (# of Jobs/second)
- fairness - roughly corresponds to 1/(variance in latency etc)
but these two goals conflict
Really Simple Scheduler - FCFS: First Come First Served (FIFO)
example
| tasks | arrival time | runtime | first output |
|---|
| A | 1 | 5 | 2 |
| B | 2 | 2 | 1 |
| C | 3 | 9 | 4 |
| D | 4 | 4 | 1 |
Schedule
AAAAAδBBδCCCCCCCCCδDDDD

| Process | wait time | response time | latency |
|---|
| A | 0 | 2 | 5 |
| B | 4+δ | 5+δ | 6+δ |
| C | 5+2δ | 9+2δ | 14+2δ |
| D | 13+3δ | 14+3δ | 17+3δ |
latency = wait time + run time
response = wait time + time to first output
utilization = real work / total work = 20 / (20 + 3δ)
average wait = 5.5 + 1.5δ
FCFS - good properties
FCFS - downside
- not fair
- Because long tasks tend to be CPU-bound, they set up a convoy effect (imagine a lot of fast small cars stuck behind a big slow truck)
- I/O devices are underutilized
Shortest Job First
scheduler always chooses the shortest runnable task (assuming it knows the length of the jobs)
Schedule for SJF
AAAAAδBBδDDDDδCCCCCCCCC
| Process | wait time | response time | latency |
|---|
| A | 0 | 2 | 5 |
| B | 4+δ | 5+δ | 6+δ |
| C | 9+3δ | 13+3δ | 18+3δ |
| D | 4+2δ | 5+2δ | 8+2δ |
processes A and B are the same as before
utilization = real work / total work = 20 / (20 + 3δ) (same as FCFS)
average wait = 4.25 + 1.5δ (better!)
SJF - good properties
- can be proven to always have the smallest possible average wait time
SJF - downside
- starvation is possible for long jobs (if small jobs keep appearing)
Round Robin (RR)
Preemption increases the power of the scheduler
the units of time that each process is allowed to run for is called a quantum. For this example we will use Q=2
Schedule for RR
AAδBBδCCδDDδAAδCCδDDδAδCCCCC
| Process | wait time | response time | latency |
|---|
| A | 0 | 2 | 15+7δ |
| B | 1+δ | 2+δ | 3+δ |
| C | 2+2δ | 10+5δ | 18+8δ |
| D | 3+3δ | 4+3δ | 10+5δ |
traded off wait time for utilization
utilization = real work / total work = 20 / (20 + 8δ)
average wait = 1.5 + 1.5δ
FCFS: starvation is impossible
SJF: starvation is possible
RR: starvation? YES if new tasks are put at the beginning of the queue.
NO if they are put at the end.
Families
Priority Scheduling
Always schedule the highest priority task first.
priority 1 > priority 2
Priorities can be external (set by user) or internal (set by the OS)
Priority scheduling has starvation problems if any priority scheme is allowed.
One solution: subtract age of task from its priority.
Multi level priority queues
System level queue and interactive tasks queue.
Different algorithm for each queue.
Batch tasks: you can move stuff from one queue to another.
Real Time Schedules
There's no real deadline: "Do what you can."
Hard real time
(e.g. Nuclear power plant)
Deadline must be met no matter what
Predictability trumps performance
Disable caches
Disable Interrupts
Soft real time
(e.g. video player)
Some deadlines can be missed.
Earliest deadline first (is one scheduling algorithm)
Rate-monotonic scheduler: tasks that need to be done more often get the highest priority.
Old tasks get killed.
Synchronization
Coordinate actions (of multiple threads) in a shared address space
Maintain data consistency.
Efficient (both utilization and waiting)
Simple, clean
Fix race condition
Race condition: bad behavior due to code being executed in wrong order.
Example
(Parenthesized numbers represent order of execution)
shared data: int balance = 10;
Dr. Eggert
void deposit(unsigned int n) { // Eggert tries to deposit $1
balance+= n;
}
(1) LD balance, r1
(5) add n, r1
(6) st r1, balance
Dr. Eggert's nephew Bill
void withdraw(unsigned int n) { // Nephew tries to withdraw $1
if(n<=balance)
balance-= n;
}
(2) LD balance, r1
(3) sub n, r1
(4) st r1, balance
When we're done there are $11 in the account!
Concepts:
OBSERVABILITY: what can you see?
SERIALIZABILITY
_______interface_________
| |
| SYSTEM |
| |
| (stuff going on in //) |
|________________________|
Within the Stuff going on in parallel there are transitions between states.
The transitions are things like deposit/withdrawl.
Behavior in these states can be messed up, confused, complicated.
No matter what happens at low (internal) level, observers can explain it with a series of transitions.